Процедура, проведенная роботом, считается одной из самых сложных в хирургии.
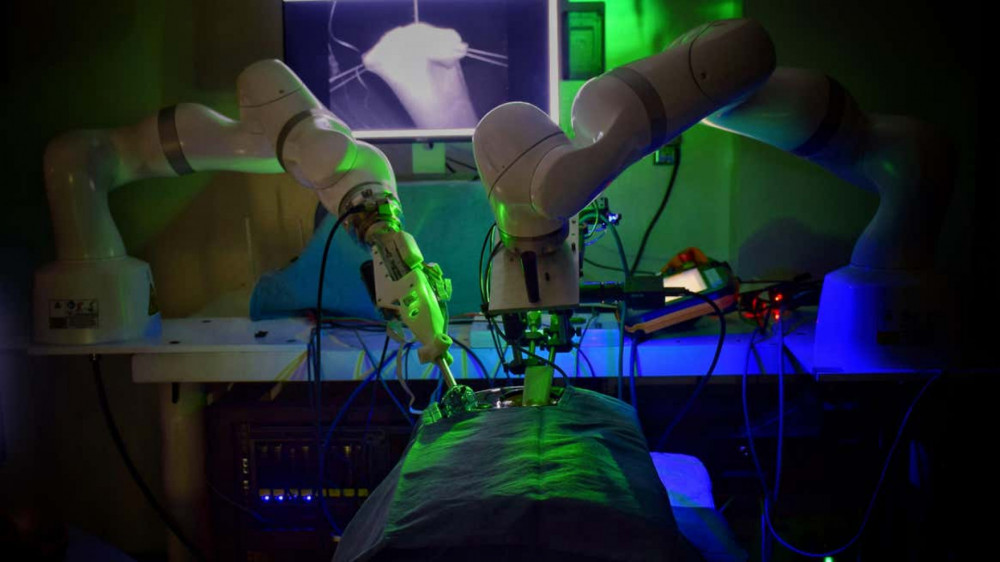
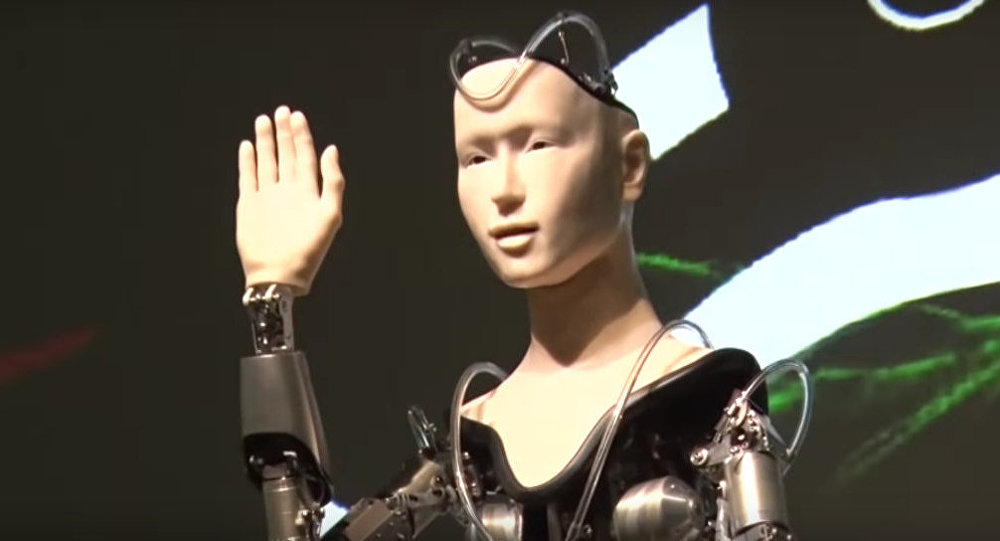
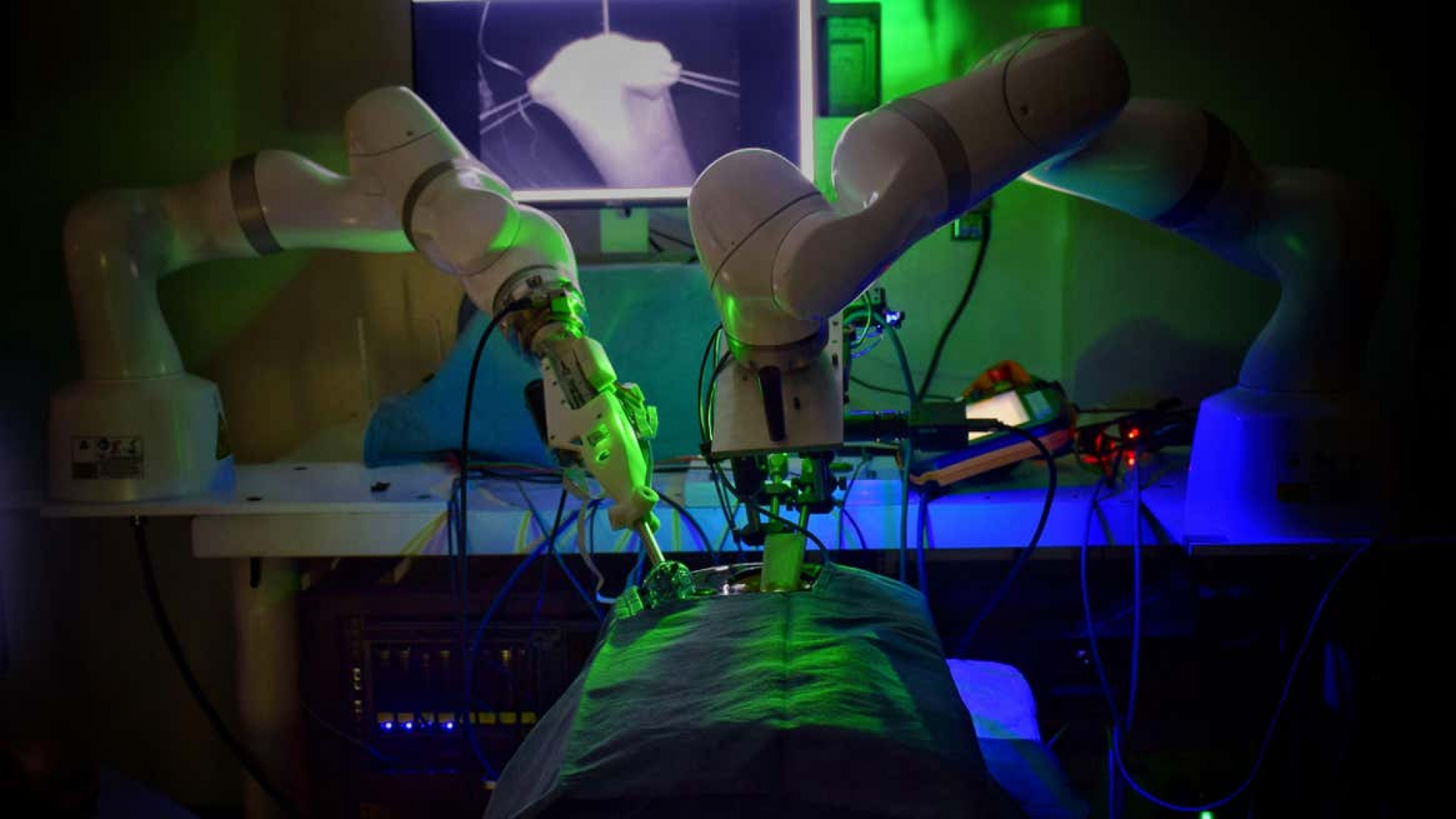
Разработанный группой исследователей Университета Джонса Хопкинса автономный робот Smart Tissue (STAR) провел лапароскопическую операцию на мягких тканях свиньи без направляющей руки человека. Как отмечают специалисты, это значительный шаг в робототехнике на пути к полностью автоматизированным операциям на людях.
«Наши результаты показывают, что мы можем автоматизировать одну из самых сложных и деликатных операций в хирургии: повторное соединение двух концов кишечника. STAR провел процедуру на четырех животных и дал значительно лучшие результаты, чем врачи, выполняющие ту же процедуру», – Аксель Кригер, ведущий автор исследования.
Робот преуспел в кишечном анастомозе (хирургическом соединении двух структур) – процедуре, которая требует высокого уровня повторяющихся движений и точности. Соединение двух концов кишечника, пожалуй, самый сложный этап в желудочно-кишечной хирургии, требующий от хирурга наложения швов с высокой точностью и последовательностью. Даже малейшее дрожание рук или неправильно наложенный шов могут обернуться катастрофическими последствиями для пациента.
Работая с сотрудниками Детской национальной больницы в Вашингтоне, округ Колумбия, и Джином Кангом, профессором электротехники и вычислительной техники Университета Джона Хопкинса, Кригер помог создать робота, предназначенного специально для сшивания мягких тканей.
Текущая версия робота представляет собой усовершенствованную модель 2016 года, которая довольно точно умела восстанавливать кишечник свиньи, но требовала как слишком большого разреза для доступа к кишечнику, так и большего вмешательства со стороны людей.
По словам Кригера, операции на мягких тканях особенно сложны для роботов из-за их непредсказуемости, вынуждающей их быстро адаптироваться к неожиданным препятствиям. STAR имеет новую систему управления, которая может корректировать хирургический план в режиме реального времени, как это сделал бы хирург-человек.
Трехмерный эндоскоп на основе структурного света и алгоритм отслеживания на основе машинного обучения, разработанный Кангом и его учениками, направляет STAR.
«Мы считаем, что передовая система трехмерного машинного зрения необходима для того, чтобы сделать интеллектуальных хирургических роботов умнее и безопаснее», – Джон Канг.
По словам Кригера, по мере того, как медицина движется к более лапароскопическим подходам к операциям, будет важно иметь автоматизированную роботизированную систему, предназначенную для таких процедур.
«Что делает STAR особенным, так это то, что это первая роботизированная система, которая планирует, адаптирует и выполняет хирургический план в мягких тканях с минимальным вмешательством человека. Роботизированный анастомоз – один из способов гарантировать, что хирургические задачи, требующие высокой точности, будут выполняться с наилучшим результатом у каждого пациента, независимо от навыков хирурга.
Мы предполагаем, что это приведет к демократизированному хирургическому подходу к лечению пациентов с более предсказуемыми и последовательными результатами», – заключает Кригер.


































 Смех
Смех Интерес
Интерес Вдохновение
Вдохновение Красота
Красота Умиление
Умиление Радость
Радость Удивление
Удивление Трогательно
Трогательно Гнев
Гнев Отвращение
Отвращение